Another critical term to the understanding of how robot works is the degree of freedom usually abbreviated as DOF. Of course you are already asking yourself that what is even this degree of freedom that we talk about. Fine, generically it is defined , in a mechanics context, as a defined modes in which a mechanical device or system can move. The number of degrees of freedom is equal to the total number of independent displacements or aspects of motion.
But for non technical people what does it really mean ?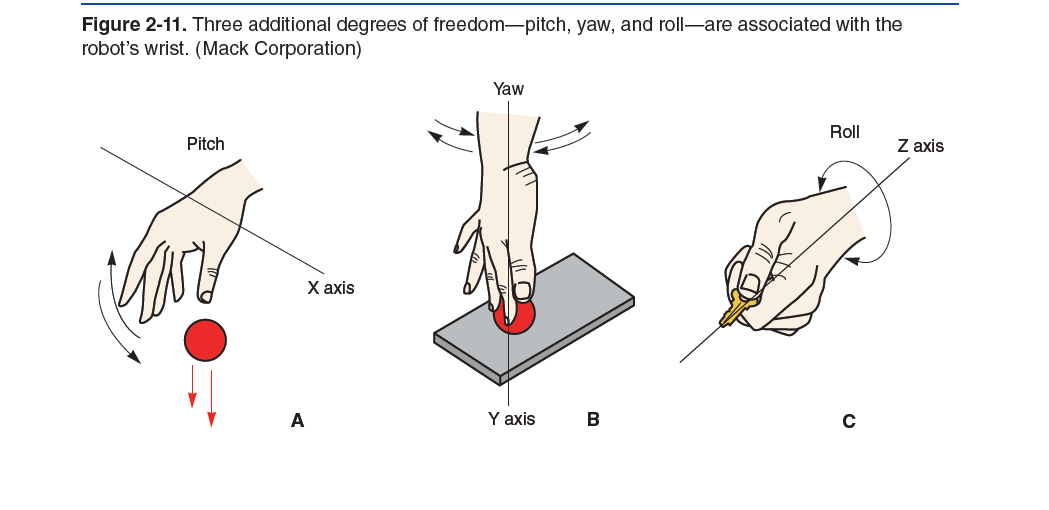
DOF are the amount of movable joints that a robot has. Essentially the more DOF that a robot has the more it can move and interact with its environment. Degrees of freedom are measured as the total amount of all the degrees of freedom of every moving part. For example let us consider a robot arm built to work like a human arm. Shoulder motion can take place as pitch (up and down) or yaw (left and right). Elbow motion can occur only as pitch. Wrist motion can occur as pitch or yaw. Rotation (roll) may also be possible for wrist and shoulder.
Finally the DOF is a term used to describe a robot’s freedom of motion in three dimensional space—specifically, the ability to move forward and backward, up and down, and to the left and to the right. For each degree of freedom, a joint is required. A robot requires six degrees of freedom to be completely versatile. The number of degrees of freedom defines the robot’s configuration. For example, many simple applications require movement along three axes: X, Y, and Z. The three degrees of freedom in the robot arm are the rotational traverse, the radial traverse, and the vertical traverse.

